Chapter 2 | 二值图像与形态学
约 2429 个字 23 张图片 预计阅读时间 24 分钟
本章概述
二值图像 | Binary image 图像二值化 | Image binarization 形态学操作 | Morphological operation
- 集合的定义 | Definition of set
- 腐蚀 | Erosion
- 膨胀 | Dilation
- 开运算 | Opening
- 闭运算 | Closing
应用 | Application
如何从灰度图转为二值图像? 为什么需要二值图像(实际应用中二值化能把不重要的信息去掉)
Binary Image
灰度图与二值图像的差别如下图所示:

二值图像(Binary Image)中像素(Pixel)的值只有 {0,1} 或者 {0,255},编程中我们一般用 {0,255} 来构造二值图像。
二值图像的优缺点:
-
优点:
- 更小的内存需求
- 运行速度更快
- 为二值图像开发的算法往往可以用于灰度级图像
-
缺点:
- 应用范围有限;
- 无法推广到三维空间中
- 表现力欠缺,不能表现物体内部细节
- 无法控制对比度
Image binarization
- 设置一个阈值 Threshold,比阈值小的置为 0, 比阈值大的置为 255.
- 如何选取合适的 threshold?
基本思想:将二值化得到的二值图像视为两部分,一部分对应前景(Foreground
这就是大津算法的思想
OTSU 大津法
大津法(OTSU)是一种确定图像二值化分割阈值的算法,由日本学者大津于 1979 年提出。从大津法的原理上来讲,该方法又称作最大类间方差法,因为按照大津法求得的阈值进行图像二值化分割后,前景与背景图像的类间方差最大。
原理推导
OTSU 算法的本质思想就是最大化类间方差
从目的来看我们想设置一个阈值 \(\tau\) 将图像中的像素分为 \(A\)( 大于 \(\tau\))、\(B\)( 小于 \(\tau\)) 两类。那么我们这个阈值的取值范围就是 \([0,255]\)。这里我们取整数,在这 256 个数中选取一个作为我们分割图像的阈值
怎么选取这个阈值呢?我们从代码层面来说
先统计图形中每个灰度的像素个数,设 \(n_i\) 为图像中灰度为 \(i\) 的像素的数量,则有 \(n_0,n_1,n_2...n_{255}\)
图像中像素灰度为 \(i\) 的概率为 :
且有:
此时根据 OSTU 的思想来看,我们应该找出一个 \(\tau\) 使得 A、B 两类的方法最大。者可以看成一个求最大值的问题,用 \(\tau\) 遍历 0-255 所有的整数,求出所有对应的方差,取最大方差对应的 \(\tau\)
那现在唯一的问题就是已知 \(\tau\) 和图像,如何求 A 与 B 的方差了
设阈值为 \(k\) 时,像素被分到 A 的概率为 \(p_A(k)\)、分配到 A 的像素的平均灰度为 \(m_A(k)\)
同理设像素被分到 B 的概率为 \(p_B(k)\)、分配到 B 的像素的平均灰度为 \(m_B(k)\)
还有灰度级 \(k\) 的累加均值 \(m \triangleq \Sigma _{i=0} ^k ip_i\),整个图像的灰度值 \(m_G \triangleq \Sigma _{i=0} ^{255} ip_i\)
则有:
根据方差的概念,方差的表达式写成:
将 (1) 带入 (3):
其中:
当然,为了尊重原著我们可以把 (4) 写成
- 过程简述
- Step 1: 确定原始图像中像素灰度的最大值和最小值;
- Step 2: 最小值加 1 作为 threshold 对原始图像进行二值化操作;
- Step 3: 根据对应关系确定前景和背景,分别计算当前 threshold 下的内部协方差和外部协方差
; (算一个就可以了) - Step 4: 回到 Step 2 直到达到像素最大值;
- Step 5:比较找到最大外部和最小内部协方差对应的 threshold.
我们可以将前述 thresholding 策略推广到彩色图像,同时考虑 rgb 三个通道,我们就可以针对特定的色彩进行 thresholding 操作 ( 思想类似,但是具体操作暂略 )
Example

大津算法存在问题:全局进行二值化操作不给力,如中间这幅图。

我们可以采用局部自适应操作来优化成为右边的图。具体思想:设定一个局部窗口,在整个图像上滑动该窗口;对于每一窗口位置,确定针对该窗口的 threshold。
Morphology Operation
Morphology
-
形态学 Morphology
1960s 后期提出,研究动植物的结构与形态。形态学一般指生物学中研究动物和植物结构的一个分支
-
数学形态学 Mathematical morphology
基础理论:集合论。采用一种简单的非线性代数算子,主要用于二值图像,可扩展到灰度图像。用在噪声过滤、形状简化、细化、分割、物体描述等
用数学形态学(也称图像代数)表示以形态为基础对图像进行分析的数学工具
- 基本思想是用具有一定形态的结构元素 (structure element) 去度量和提取图像中的对应形状以达到对图像分析和识别的目的。
- 形态学图像处理的数学基础和所用语言是集合论。
- 形态学图像处理的应用可以简化图像数据,保持它们基本的形状特性,并除去不相干结构。
- 形态学图像处理的基本运算有 4 个:膨胀、腐蚀、开操作和闭操作
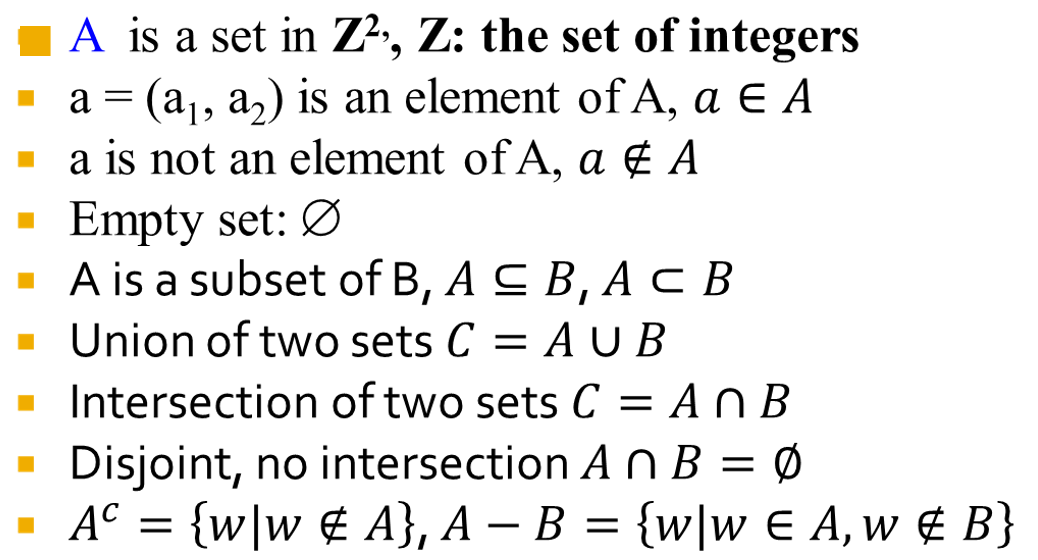
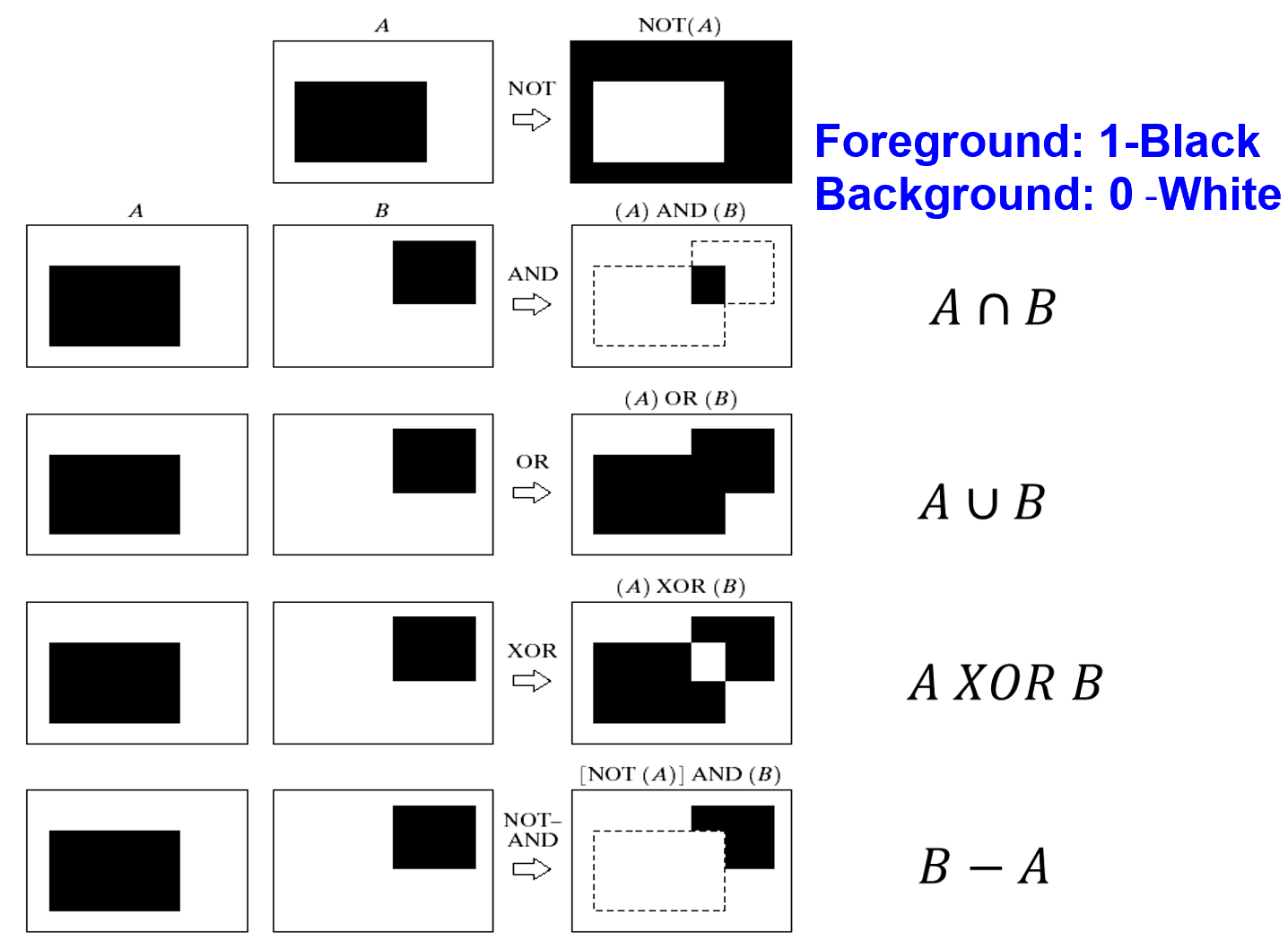
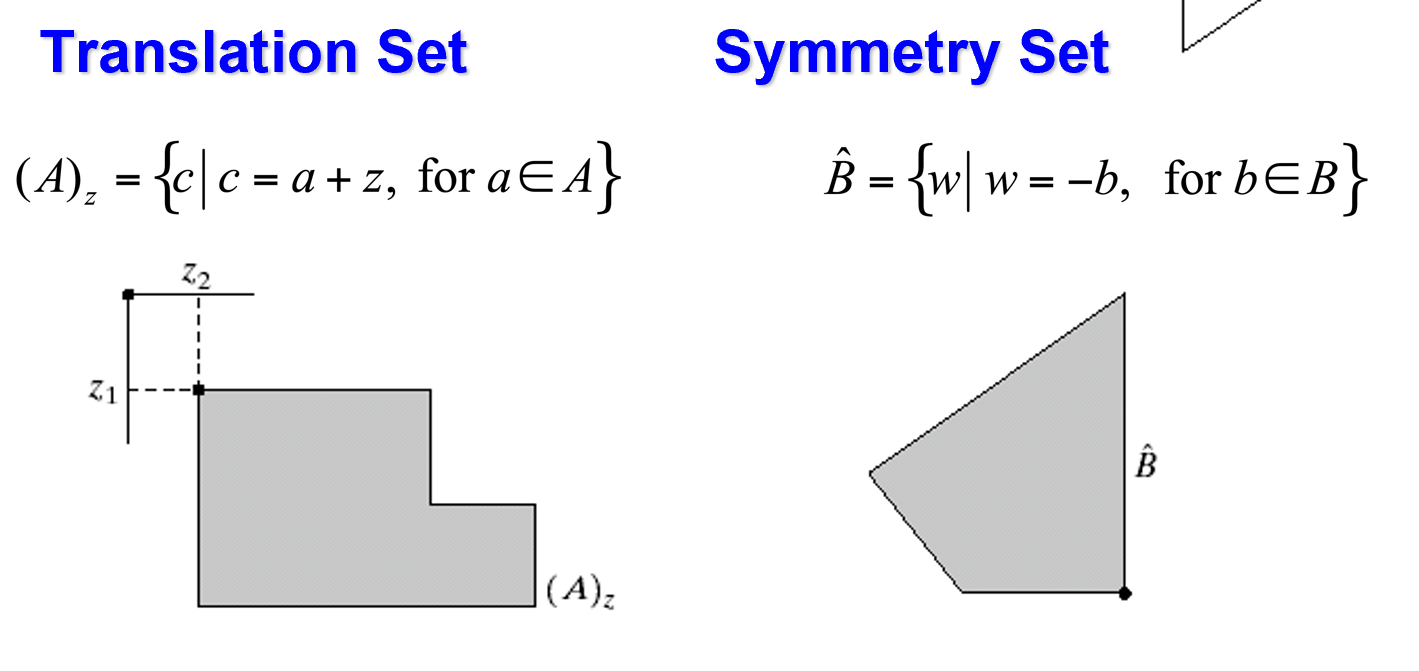
Set Theory for Image
For reference
膨胀 | Dilation
膨胀是将与物体“接触”的所有背景点合并到该物体中,使边界向外部扩张的过程。可以用来填补物体中的空洞
其中 A:二值图像;B:二值模板,称为结构元(structure element)
该式 B 对 A 膨胀,注意这里的 \(\oplus\) 不是异或的意思
膨胀的方法简单来说就是将 B 的中心遍历放置在图像 A 中所有像素点,如果 B 与 A 没有任何接触,那么这个点不作为扩张点,否则这个点就作为扩张点
Dimension 1




Dimension 2

这里的图中第二行的格子有些大,具有一定的误导性
显然我们发现,选择不同形状的结构元,结果也不同。一般来说,我们更多地选择各向同性(即对称)的结构元
腐蚀 | Erosion
腐蚀是一种消除边界点,使边界向内部收缩的过程。可以用来消除小且无意义的物体。
同理
\(A\): Binary image
\(B\): binary template, structure element
Physical meaning: remove boundary, remove unwanted small objects.
腐蚀的做法简单来说,就是将结构元 B 遍历 A 的每一个像素,只有 B 被 A 完全包含的像素才不会被腐蚀
Dimension 1





Dimension 2

Padding
可能有人会有疑问,加入我们的扫描从第一行开始,结构元可能就超出了图像的边界(例如十字形的结构元
Application for Erosion
滤波

这里我们腐蚀了白色像素
提取边界

补洞

接下来我们对膨胀和腐蚀做一个小的总结:
Dilation and Erosion
- 膨胀
由B对A膨胀所产生的二值图像D是满足以下条件的点(x,y)的集合:如果B的原点平移到点(x,y),那么它与A的交集非空。 - 腐蚀
由B对A腐蚀所产生的二值图像E是满足以下条件的点(x,y)的集合:如果B的原点平移到点(x,y),那么B将完全包含于A中 - 膨胀与腐蚀是对偶的
\((A\ominus B)^c=\{z|(B_z)\subseteq A\}^c=\{z|(B_z)\cap A=\varnothing\}^c=\{z|(B_z)\cap A^c \neq \varnothing\}=A^c\oplus B\)
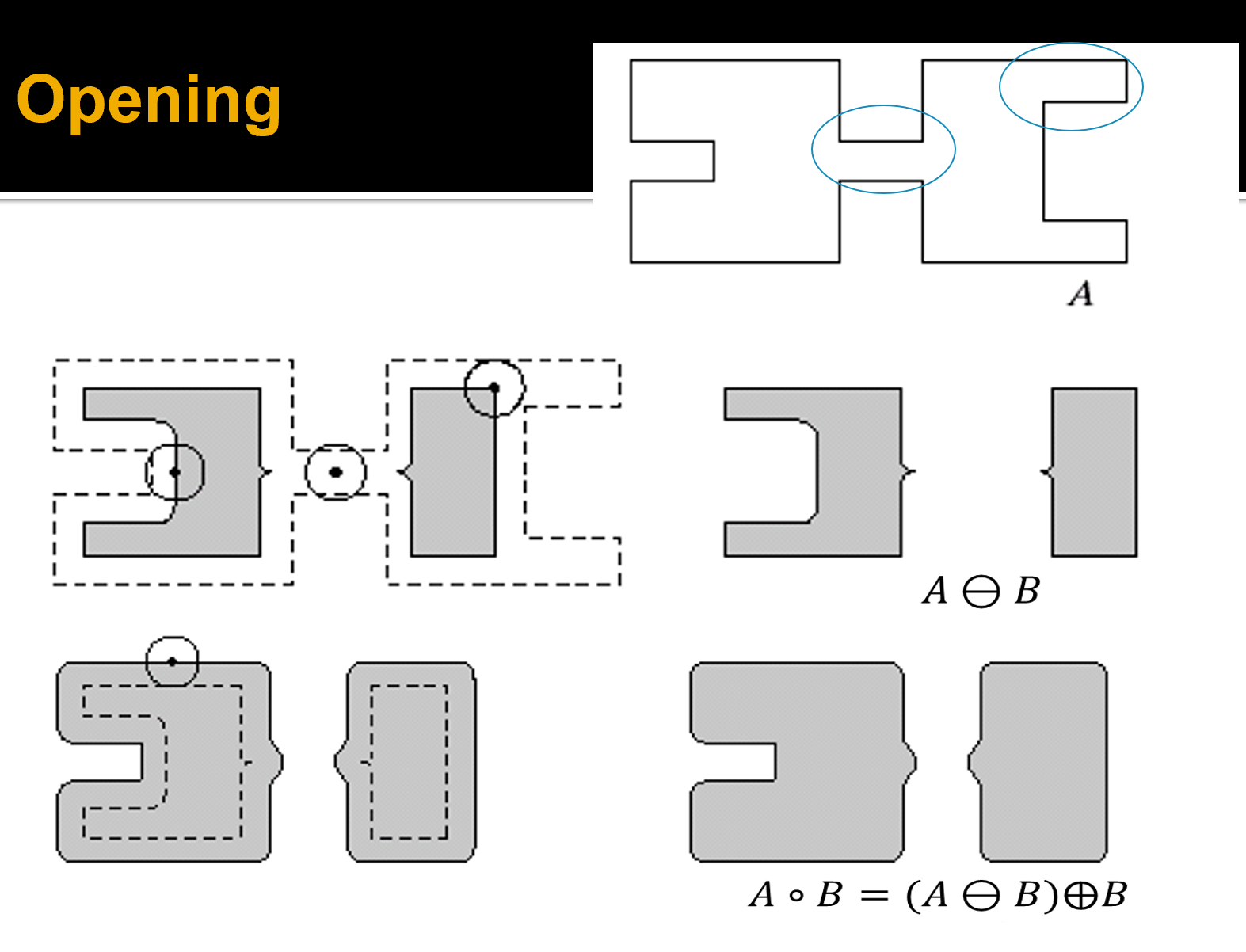
开运算 | Open
先腐蚀,后膨胀 \(A\circ B=(A\ominus B)\oplus B\)
Remove small objects, segment object at thin part, smooth boundary of large object but preserve its original area.
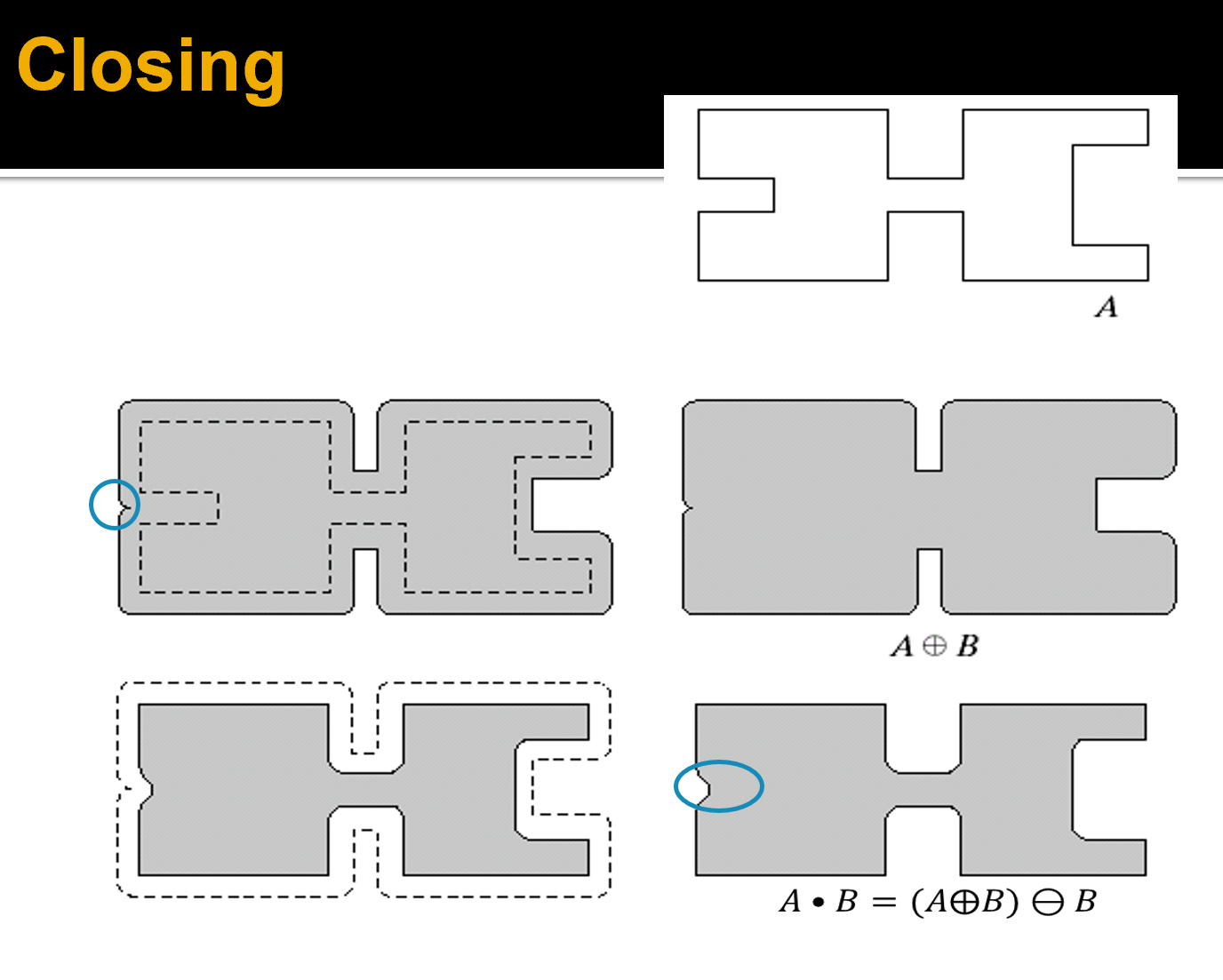
闭运算 | Close
先膨胀,后腐蚀 \(A \bullet B =(A\oplus B)\ominus B\)
Fill small holes, connect the neighboring objects, smooth boundary while preserving the area at most.
| 操作 | 定义 | 主要功能 | 适合处理的情况 |
|---|---|---|---|
| 开运算 (Open) | 先腐蚀再膨胀 | 去除小前景噪声,平滑物体边缘 | 适合去除细小的白色前景噪声,平滑前景边缘 |
| 闭运算 (Close) | 先膨胀再腐蚀 | 填充小孔,连接断裂部分,平滑边缘 | 适合填补前景中的小黑色空洞,连接前景物体 |
总结
